 TEXTILES.ORG
TEXTILES.ORG
A new robotic gripper has found a completely new solution for gripping previously impossible objects. It uses the ancient Japanese art form of kirigami. Related to the paper-folding art of origami, kirigami involves making a series of parallel slits in a flat sheet of material. When the two-dimensional sheet is subsequently pulled apart, pushed inward, twisted or otherwise manipulated, the slits cause it to buckle into a predetermined, three-dimensional shape. The 3D shape the kirigami sheet takes on is determined not only by the slit patterns and the way in which it’s manipulated, but also by the shape of the flat sheet.
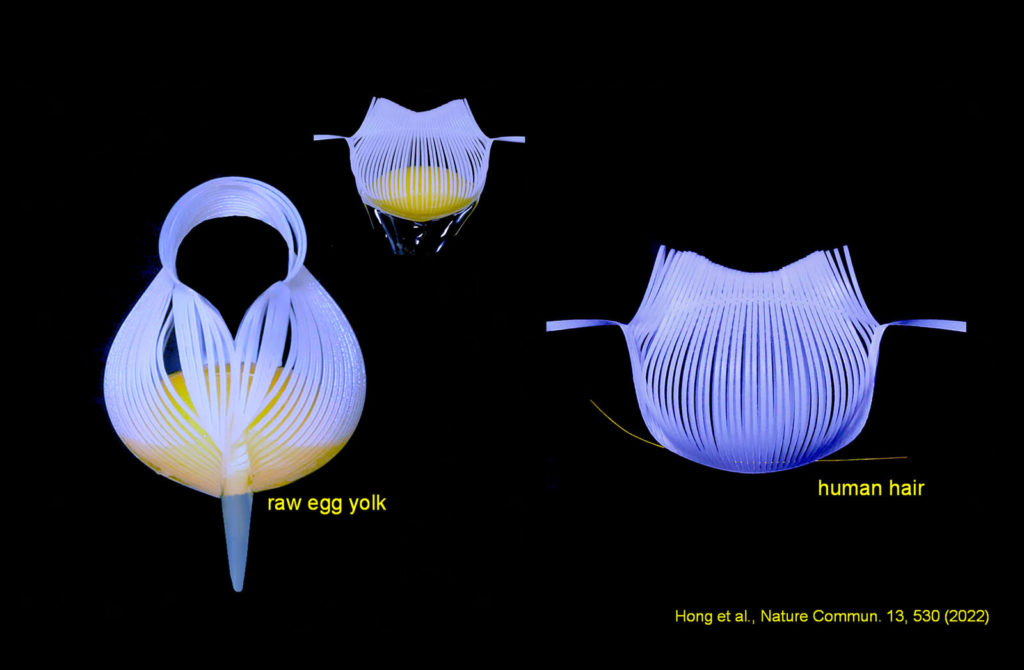
Led by Ph.D. student Yaoye Hong and Assoc. Prof. Jie Yin, a team at North Carolina State University has developed a computer program to determine the sheet shape, slit pattern and manipulation for a specified 3D shape. The scientists created a flexible robotic gripper, the two sides of which slide together beneath a fragile object. Not only is the device gentle enough to lift even an egg yolk without breaking it, but it’s also precise enough to grasp and lift a human hair.